Objectifs d’apprentissage
À la fin de cette section, vous serez en mesure de :
- Décrire le mouvement du mouvement harmonique amorti
- Écrire les équations du mouvement pour les oscillations harmoniques amorties
- Décrire le mouvement du mouvement harmonique amorti entraîné, ou forcé
- Écrire les équations du mouvement pour le mouvement harmonique amorti forcé
Dans le monde réel, les oscillations suivent rarement une véritable SHM. La friction d’une certaine sorte agit généralement pour amortir le mouvement de sorte qu’il meurt, ou nécessite plus de force pour continuer. Dans cette section, nous examinons quelques exemples de mouvement harmonique amorti et voyons comment modifier les équations du mouvement pour décrire ce cas plus général.
Une corde de guitare cesse d’osciller quelques secondes après avoir été pincée. Pour continuer à se balancer sur une balançoire de cour de récréation, il faut continuer à pousser ((Figure)). Bien que nous puissions souvent rendre la friction et d’autres forces non conservatrices petites ou négligeables, un mouvement complètement non amorti est rare. En fait, nous pouvons même vouloir amortir les oscillations, comme avec les amortisseurs de voiture.

Figure 15.24 Pour contrer les forces d’amortissement, vous devez continuer à pomper une balançoire. (crédit : Bob Mical)
(Figure) montre une masse m attachée à un ressort avec une constante de force k. La masse est élevée à une position {A}_{0} , l’amplitude initiale, puis relâchée. La masse oscille autour de la position d’équilibre dans un fluide avec viscosité, mais l’amplitude diminue à chaque oscillation. Pour un système qui a une petite quantité d’amortissement, la période et la fréquence sont constantes et sont presque les mêmes que pour SHM, mais l’amplitude diminue progressivement comme indiqué. Cela se produit parce que la force d’amortissement non conservative retire de l’énergie au système, généralement sous forme d’énergie thermique.
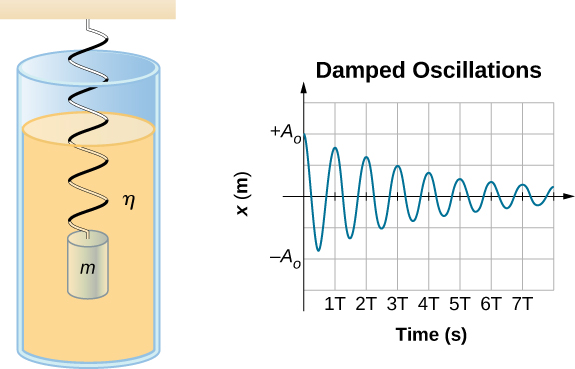
Figure 15.25 Pour une masse sur un ressort oscillant dans un fluide visqueux, la période reste constante, mais les amplitudes des oscillations diminuent à cause de l’amortissement causé par le fluide.
Considérez les forces agissant sur la masse. Notez que la seule contribution de la masse est de changer la position d’équilibre, comme discuté plus tôt dans le chapitre. Par conséquent, la force nette est égale à la force du ressort et à la force d’amortissement ({F}_{D}) . Si la vitesse est faible, ce qui signifie que la masse oscille lentement, la force d’amortissement est proportionnelle à la vitesse et agit dans le sens contraire du mouvement ({F}_{D}=\text{-}bv) . La force nette sur la masse est donc
En écrivant cela comme une équation différentielle en x, on obtient
Pour déterminer la solution de cette équation, on considère le tracé de la position en fonction du temps représenté sur (Figure). La courbe ressemble à une courbe en cosinus oscillant dans l’enveloppe d’une fonction exponentielle {A}_{0}{e}^{\text{-}\alpha t} où \alpha =\frac{b}{2m} . La solution est
On laisse comme exercice de prouver que c’est, en fait, la solution. Pour prouver que c’est la bonne solution, on prend les dérivées premières et secondes par rapport au temps et on les substitue dans (Figure). On trouve que (Figure) est la solution si
Rappelons que la fréquence angulaire d’une masse subissant une MHS est égale à la racine carrée de la constante de force divisée par la masse. On parle souvent de la fréquence angulaire naturelle, qui est représentée par
La fréquence angulaire pour un mouvement harmonique amorti devient
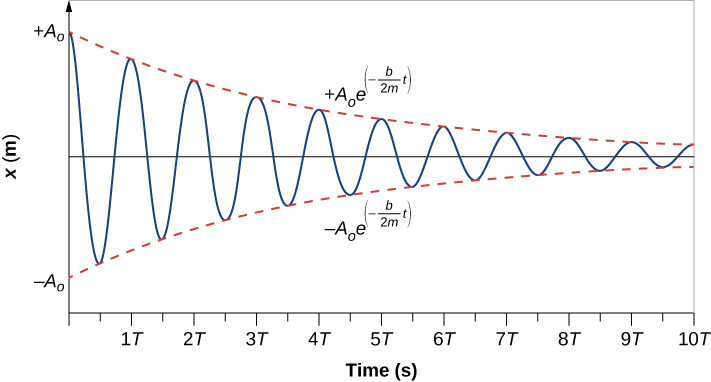
Figure 15.26 Position en fonction du temps pour la masse oscillant sur un ressort dans un fluide visqueux. Remarquez que la courbe semble être une fonction cosinus à l’intérieur d’une enveloppe exponentielle.
Rappellez-vous que lorsque nous avons commencé cette description du mouvement harmonique amorti, nous avons déclaré que l’amortissement devait être faible. Deux questions viennent à l’esprit . Pourquoi l’amortissement doit-il être petit ? Et à quel point est-il petit ? Si vous augmentez progressivement la quantité d’amortissement dans un système, la période et la fréquence commencent à être affectées, car l’amortissement s’oppose au mouvement de va-et-vient et le ralentit donc. (La force nette est plus faible dans les deux directions.) Si l’amortissement est très important, le système n’oscille même pas – il se rapproche lentement de l’équilibre. La fréquence angulaire est égale à
A mesure que b augmente, \frac{k}{m}-{(\frac{b}{2m})}^{2} devient plus petit et finit par atteindre zéro lorsque b=\sqrt{4mk} . Si b devient plus grand, \frac{k}{m}-{(\frac{b}{2m})}^{2} devient un nombre négatif et \sqrt{\frac{k}{m}-{(\frac{b}{2m})}^{2}} est un nombre complexe.
(Figure) montre le déplacement d’un oscillateur harmonique pour différentes quantités d’amortissement. Lorsque la constante d’amortissement est petite, b<\sqrt{4mk}. le système oscille alors que l’amplitude du mouvement décroît exponentiellement. On dit que ce système est sous-amorti, comme dans la courbe (a). De nombreux systèmes sont sous-amortis, et oscillent alors que l’amplitude décroît de manière exponentielle, comme la masse oscillant sur un ressort. L’amortissement peut être très faible, mais la masse finit par s’immobiliser. Si la constante d’amortissement est b=\sqrt{4mk}. on dit que le système est amorti de façon critique, comme dans la courbe (b). Les amortisseurs d’une voiture sont un exemple de système à amortissement critique. Il est avantageux que les oscillations diminuent aussi rapidement que possible. Ici, le système n’oscille pas, mais se rapproche asymptotiquement de la condition d’équilibre aussi rapidement que possible. La courbe (c) de la (Figure) représente un système suramorti où b>\sqrt{4mk}. Un système suramorti se rapprochera de l’équilibre sur une plus longue période de temps.
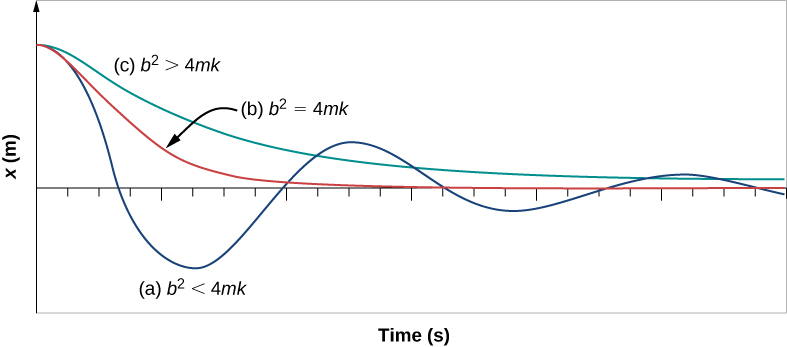
Figure 15.27 La position en fonction du temps pour trois systèmes constitués d’une masse et d’un ressort dans un fluide visqueux. (a) Si l’amortissement est faible (b<\sqrt{4mk}), la masse oscille, perdant lentement de l’amplitude au fur et à mesure que l’énergie est dissipée par la ou les forces non conservatives. Le cas limite est (b) où l’amortissement est (b=\sqrt{4mk}) . (c) Si l’amortissement est très grand (b>\sqrt{4mk}) , la masse n’oscille pas lorsqu’elle est déplacée, mais tente de revenir à la position d’équilibre.
L’amortissement critique est souvent souhaité, car un tel système revient rapidement à l’équilibre et y reste également. En outre, une force constante appliquée à un système à amortissement critique déplace le système vers une nouvelle position d’équilibre dans le temps le plus court possible sans dépassement ou oscillation autour de la nouvelle position.
Vérifiez votre compréhension
Pourquoi les oscillateurs harmoniques complètement non amortis sont-ils si rares ?
Sommaire
- Les oscillateurs harmoniques amortis ont des forces non conservatives qui dissipent leur énergie.
- L’amortissement critique ramène le système à l’équilibre aussi vite que possible sans dépassement.
- Un système sous-amorcé oscillera par la position d’équilibre.
- Un système sur-amorcé se déplace plus lentement vers l’équilibre qu’un système amorti de façon critique.
Questions conceptuelles
Donnez un exemple d’oscillateur harmonique amorti. (Ils sont plus courants que les oscillateurs harmoniques non amortis ou simples.)
Comment une voiture rebondirait-elle après une bosse dans chacune de ces conditions ?
(a) suramortissement
(b) sous-amortissement
(c) amortissement critique
La plupart des oscillateurs harmoniques sont amortis et, s’ils ne sont pas entraînés, finissent par s’arrêter. Pourquoi ?
Problèmes
L’amplitude d’un oscillateur légèrement amorti diminue de 3,0 % au cours de chaque cycle. Quel pourcentage de l’énergie mécanique de l’oscillateur est perdu à chaque cycle ?
Glossaire
état d’amortissement critique dans lequel l’amortissement d’un oscillateur fait qu’il revient le plus rapidement possible à sa position d’équilibre sans osciller d’avant en arrière autour de cette position fréquence angulaire naturelle fréquence angulaire d’un système oscillant en SHM état suramorcé dans lequel l’amortissement d’un oscillateur le fait revenir à l’équilibre sans osciller ; l’oscillateur se déplace plus lentement vers l’équilibre que dans le système amorti de manière critique condition sous-amortie dans laquelle l’amortissement d’un oscillateur entraîne la diminution de l’amplitude des oscillations d’un oscillateur harmonique amorti au fil du temps, pour finalement se rapprocher de zéro
.