Objetivos de aprendizaje
Al finalizar esta sección, serás capaz de:
- Describir el movimiento del movimiento armónico amortiguado
- Escribir las ecuaciones de movimiento para las oscilaciones armónicas amortiguadas
- Describir el movimiento del movimiento armónico amortiguado impulsado, o forzado
- Escribir las ecuaciones de movimiento para el movimiento armónico amortiguado forzado
En el mundo real, las oscilaciones rara vez siguen el verdadero SHM. La fricción de algún tipo suele actuar para amortiguar el movimiento, de modo que desaparece, o necesita más fuerza para continuar. En esta sección, examinaremos algunos ejemplos de movimiento armónico amortiguado y veremos cómo modificar las ecuaciones de movimiento para describir este caso más general.
Una cuerda de guitarra deja de oscilar unos segundos después de ser pulsada. Para seguir balanceándose en un columpio de un parque infantil, hay que seguir empujando ((Figura)). Aunque a menudo podemos hacer que la fricción y otras fuerzas no conservativas sean pequeñas o despreciables, el movimiento completamente sin amortiguación es raro. De hecho, es posible que incluso queramos amortiguar las oscilaciones, como ocurre con los amortiguadores de los coches.

Figura 15.24 Para contrarrestar las fuerzas de amortiguación, hay que seguir bombeando un columpio. (crédito: Bob Mical)
(La figura) muestra una masa m unida a un muelle con una fuerza constante k. La masa se eleva hasta una posición {A}_{0} , la amplitud inicial, y luego se suelta. La masa oscila alrededor de la posición de equilibrio en un fluido con viscosidad, pero la amplitud disminuye en cada oscilación. Para un sistema que tiene una pequeña cantidad de amortiguación, el período y la frecuencia son constantes y son casi los mismos que para SHM, pero la amplitud disminuye gradualmente como se muestra. Esto ocurre porque la fuerza de amortiguación no conservativa elimina energía del sistema, normalmente en forma de energía térmica.
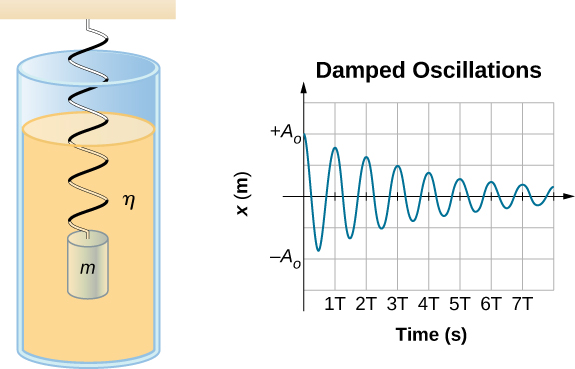
Figura 15.25 Para una masa sobre un muelle que oscila en un fluido viscoso, el periodo permanece constante, pero las amplitudes de las oscilaciones disminuyen debido al amortiguamiento causado por el fluido.
Considere las fuerzas que actúan sobre la masa. Nótese que la única contribución del peso es cambiar la posición de equilibrio, como se ha comentado anteriormente en el capítulo. Por lo tanto, la fuerza neta es igual a la fuerza del muelle y la fuerza de amortiguación ({F}_{D}) . Si la magnitud de la velocidad es pequeña, lo que significa que la masa oscila lentamente, la fuerza de amortiguación es proporcional a la velocidad y actúa en contra de la dirección del movimiento ({F}_{D}=\text{-}bv) . La fuerza neta sobre la masa es, por tanto,
Escribiendo esto como una ecuación diferencial en x, obtenemos
Para determinar la solución de esta ecuación, consideremos el gráfico de posición frente al tiempo que se muestra en (Figura). La curva se asemeja a una curva coseno que oscila en la envolvente de una función exponencial {A}_{0}{e}^{texto{-}{alpha t} donde \alpha ={frac{b}{2m} . La solución es
Se deja como ejercicio demostrar que ésta es, efectivamente, la solución. Para demostrar que es la solución correcta, se toman las derivadas primera y segunda con respecto al tiempo y se sustituyen en (Figura). Se comprueba que (Figura) es la solución si
Recordemos que la frecuencia angular de una masa que sufre SHM es igual a la raíz cuadrada de la constante de fuerza dividida por la masa. Esto se conoce a menudo como la frecuencia angular natural, que se representa como
La frecuencia angular para el movimiento armónico amortiguado se convierte en
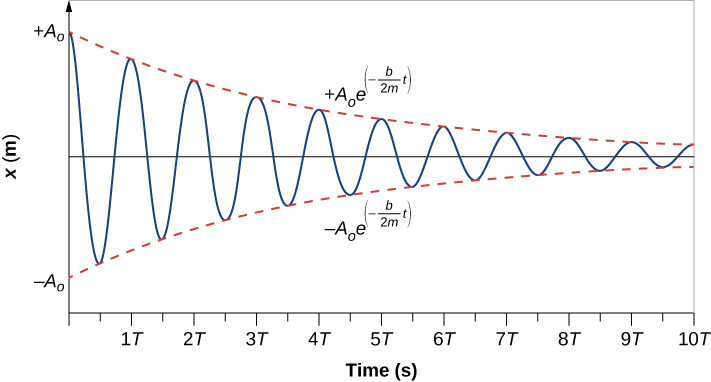
Figura 15.26 Posición en función del tiempo para la masa que oscila sobre un resorte en un fluido viscoso. Observe que la curva parece ser una función coseno dentro de una envolvente exponencial.
Recuerde que cuando comenzamos esta descripción del movimiento armónico amortiguado, afirmamos que el amortiguamiento debe ser pequeño. Se nos ocurren dos preguntas. ¿Por qué el amortiguamiento debe ser pequeño? ¿Y qué tan pequeño es? Si aumenta gradualmente la cantidad de amortiguación en un sistema, el período y la frecuencia comienzan a verse afectados, porque la amortiguación se opone y, por lo tanto, frena el movimiento de ida y vuelta. (La fuerza neta es menor en ambas direcciones.) Si la amortiguación es muy grande, el sistema ni siquiera oscila, sino que se mueve lentamente hacia el equilibrio. La frecuencia angular es igual a
A medida que b aumenta, \frac{k}{m}-{\frac{b}{2m})}^{2} se hace más pequeño y finalmente llega a cero cuando b=\sqrt{4mk} . Si b se hace más grande, \frac{k}{m}-(\frac{b}{2m})}^{2} se convierte en un número negativo y \sqrt{frac{k}{m}-(\frac{b}{2m})}^{2} es un número complejo.
(Figura) muestra el desplazamiento de un oscilador armónico para diferentes cantidades de amortiguación. Cuando la constante de amortiguación es pequeña, b<\sqrt{4mk} el sistema oscila mientras la amplitud del movimiento decae exponencialmente. Se dice que este sistema está subamortiguado, como en la curva (a). Muchos sistemas están subamortiguados, y oscilan mientras la amplitud disminuye exponencialmente, como la masa que oscila sobre un resorte. El amortiguamiento puede ser bastante pequeño, pero finalmente la masa llega al reposo. Si la constante de amortiguación es b=cuadrado{4mk} se dice que el sistema está críticamente amortiguado, como en la curva (b). Un ejemplo de sistema críticamente amortiguado son los amortiguadores de un coche. Es ventajoso que las oscilaciones decaigan lo más rápido posible. En este caso, el sistema no oscila, sino que se aproxima asintóticamente a la condición de equilibrio lo más rápidamente posible. La curva (c) en la (Figura) representa un sistema sobreamortiguado donde b>\sqrt{4mk}. Un sistema sobreamortiguado se acercará al equilibrio durante un periodo de tiempo más largo.
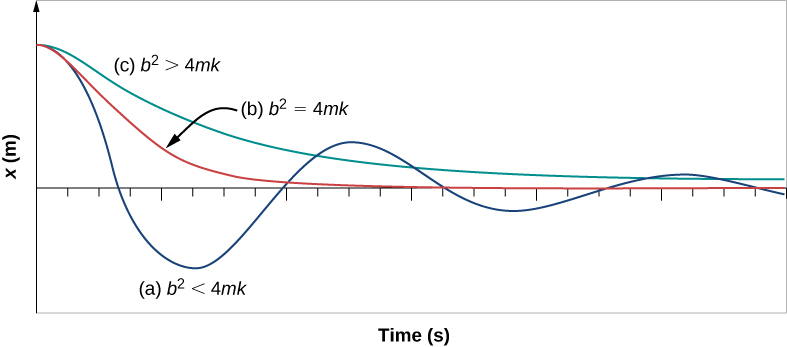
Figura 15.27 La posición en función del tiempo para tres sistemas formados por una masa y un muelle en un fluido viscoso. (a) Si el amortiguamiento es pequeño (b<\sqrt{4mk}) , la masa oscila, perdiendo lentamente la amplitud a medida que la energía es disipada por la(s) fuerza(s) no conservativa(s). El caso límite es (b) donde el amortiguamiento es (b=\sqrt{4mk}) . (c) Si el amortiguamiento es muy grande (b>\sqrt{4mk}) , la masa no oscila cuando se desplaza, sino que intenta volver a la posición de equilibrio.
Amortiguamiento crítico es a menudo deseado, porque tal sistema vuelve al equilibrio rápidamente y permanece en el equilibrio también. Además, una fuerza constante aplicada a un sistema críticamente amortiguado mueve el sistema a una nueva posición de equilibrio en el menor tiempo posible sin sobrepasar u oscilar sobre la nueva posición.
Comprueba tu comprensión
¿Por qué son tan raros los osciladores armónicos completamente no amortiguados?
Resumen
- Los osciladores armónicos amortiguados tienen fuerzas no conservativas que disipan su energía.
- La amortiguación crítica devuelve el sistema al equilibrio lo más rápido posible sin sobrepasarlo.
- Un sistema insuficientemente amortiguado oscilará a través de la posición de equilibrio.
- Un sistema sobreamortiguado se mueve más lentamente hacia el equilibrio que uno críticamente amortiguado.
Da un ejemplo de un oscilador armónico amortiguado. (Son más comunes que los osciladores armónicos no amortiguados o simples.)